
Overview
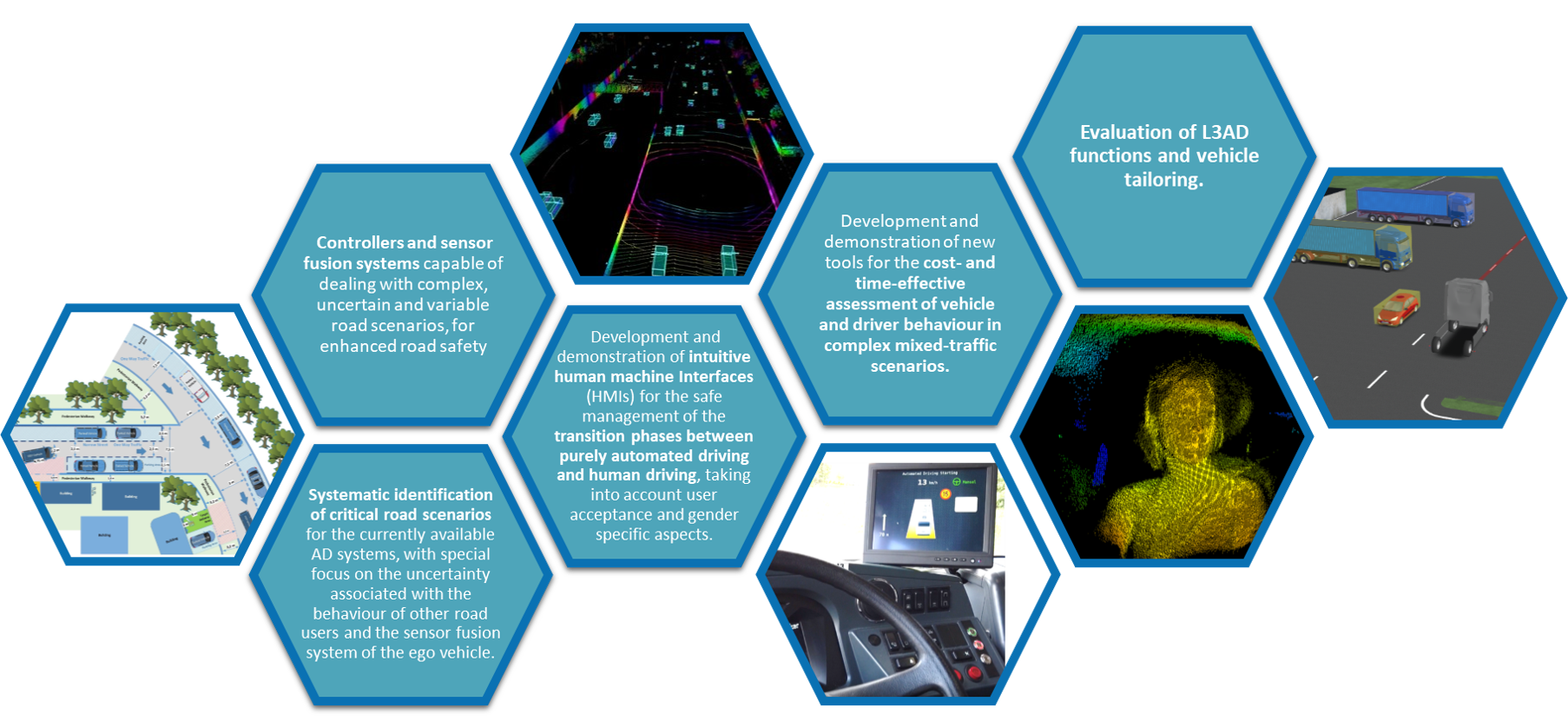
The vision of TrustVehicle is to advance level 3 and level 4 automated driving functions in normal operation and especially in critical situations in mixed traffic scenarios and even under harsh weather conditions. TrustVehicle followed a user centric approach to provide solutions that significantly increase reliability and trustworthiness of automated vehicles, covering the following objectives:
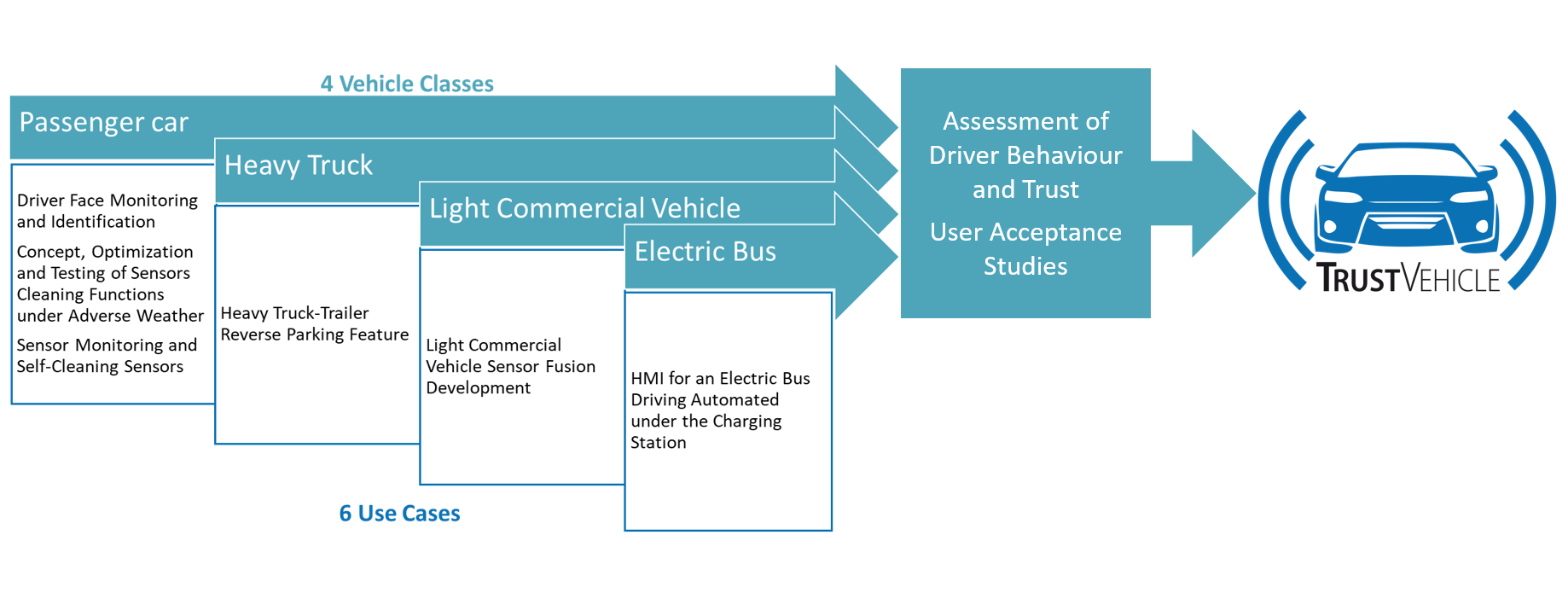
After 41 months, the consortium has achieved remarkable results built around four vehicle classes to represent a large variety of use cases and scenarios relevant for trustworthy level 3+ automated driving.
Key Results
Driver Face Monitoring and Identification
Implementation of new time-of-flight camera based sensor functionalities for driver monitoring and support.
Intuitive human-vehicle interaction by automatic driver identification, automatic mirror adjustment and automatic airbag pressure adjustment.
Based on new ToF sensor functions: Face detection, Face identification, Human pulse measurement.
Evaluated with technology demonstration and user acceptance questionnaire in laboratory ToF camera tests
Sensor Monitoring and Self-Cleaning Sensors for a Passenger Vehicle
Methods for quantifying the availability of sensors during cleaning and in critical scenarios
that can be used with any lidar sensor to evaluate the availability of the lidar during cleaning activation
to understand the impact of rain, snow and aerosol in the sensor's field of view
to improve robustness and safety of functions that make use of the sensor data.
Concept, Optimization and Testing of Sensors Cleaning Functions under Adverse Weather
Design of an AD system supervision for level 3 and 4 functions allowing to recover or maintain the sensors functionality. The aim of the AD Supervision is to monitor all the relevant information (from the environment, ADS system and vehicle systems) to make the right decision regarding the Fallback behavior.
Test methods and on road testing to improve availability of sensors under adverse weather conditions (rain, snow, fog) by Optimization of the sensor cleaning time to ensure as smooth as possible autonomous driving in adverse weather.
Building Trust in Level 3 Autonomous Commercial Vehicles - Smooth Trajectory Planning
Novel real-time trajectory planning algorithm and a dedicated non-linear trajectory controller developed for two different commercial vehicle classes: heavy truck and light commercial vehicle.
HMI for an Electric Bus driving automatcally to the Charging Station
The electric bus is driven in automated driving mode safely and accurately under the charging station. A specially developed Bus Driver HMI provides
- automated driving application touch screen and 360-camera view
- warnings both (stereo) audio and/or speech
- driver monitoring following gaze direction
- driver takeover intention detection
- option for the drivers to provide feedback about incidents to AD developers after the drive
Heavy Truck-Trailer Reverse Parking Feature
Feature for completely autonomous smooth reverse parking manoeuvres demonstrated on an urban construction site and a truck docking station to
increase safety during such manoeuvres for the truck, other people, other vehicles and the surrounding infrastructure
reduce stress of the truck driver (driver can follow the autonomous parking process via an HMI system)
Sensor Data Fusion Platform
Flexible HW platform suitable for sensor fusion to ensure the correct functioning of HW peripherals and interfaces
Starting point for more elaborated monitoring protocols
Fail-safe behavior
Light Commercial Vehicle Sensor Fusion Development
Sensor fusion algorithms implemented for LIDAR, Camera and ultrasonic sensors for autonomous narrow street manoeuvring and reverse parking.
Used scenarios are narrow street passing, perpendicular parking, hand over scenario, sudden pedestrian crossing and pedestrian crash avoidance.
Assessment of Driver Behaviour and Trust for Mixed L3AD Scenarios
Driving simulator study:
Development of an assessment method and environment to assess borderline cases of L3AD systems to be tested in a safe and flexible environment allowing an easy connection to third-party components.
The human factor assessed throughout the selected scenarios.
Evolve experience for upcoming driver monitoring systems required for L3+ applications.
User Acceptance Studies
The studies showed that end users consider the developed AD functions as
useful, reliable hence overall trustworthy, and safety improving.
But have concerns regarding functionality in adverse weather conditions.
Interested in more information and details? Check out all our publications